Les systèmes d’exosquelette permettent aux personnes victimes de handicaps ou d’accidents de marcher à nouveau, ou de fournir une force supplémentaire pour déplacer des charges lourdes.
Les articulations de la hanche et du genou sont particulièrement difficiles à actionner. Pour reproduire la fonctionnalité humaine, un couple de démarrage supérieur à 100 Nm doit être fourni, tandis que l’articulation doit rester petite, efficace et froide, car elle est en contact avec le corps de l’utilisateur.
Les appareils actuels utilisent des moteurs à haute vitesse et à forte démultiplication. Cette solution présente plusieurs inconvénients :
– Bruit aigu ressemblant à celui d’un robot lors de la marche
– Forte inertie : les mouvements rapides sont quasiment impossibles
– Quasi irréversible, ce qui signifie qu’il n’y a pas de retour d’information tactile en cas d’impact sur un obstacle.
– Complexité mécanique élevée, coût, usure et entretien importants
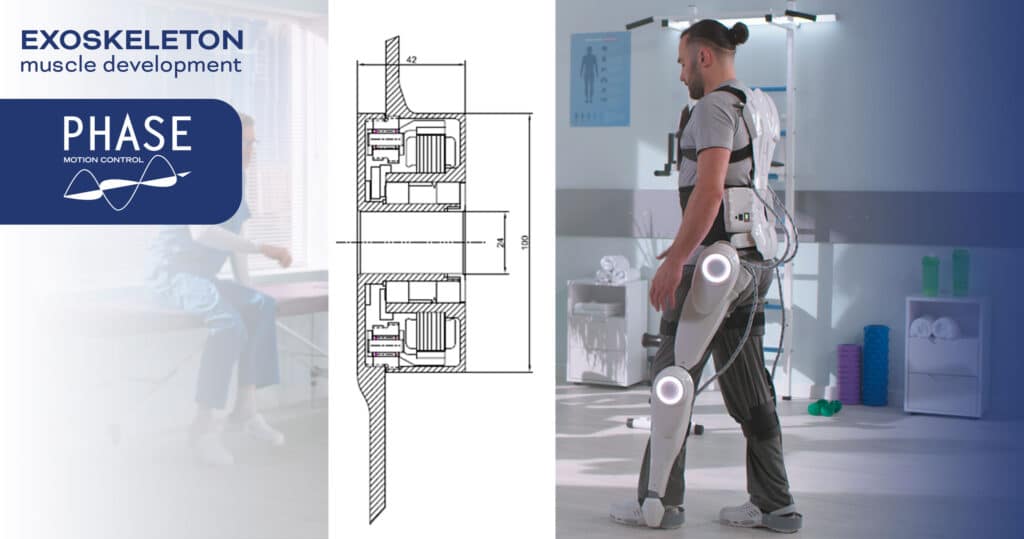
Pour résoudre ce dilemme, l’équipe R&D de Phase a développé et breveté un système d’articulation intégré dans lequel un moteur PM à couple élevé et à rotor extérieur fait partie intégrante du système de roulement de l’articulation et de l’engrenage réversible à faible rapport. Le projet fait l’objet de tests d’application.