A partir des liens ci-dessous, les utilisateurs peuvent télécharger toutes les versions officielles des microprogrammes pour la série de moteurs TWX.
Le micrologiciel est le même pour toutes les tailles et tous les types de séries TWX.Il est possible de télécharger et d’utiliser le « CompatCore legacy firmware » pour les clients des séries TW précédentes.
Pour mettre à jour ou restaurer le micrologiciel du servomoteur :
Téléchargez la version correcte du micrologiciel dont vous avez besoin à partir des liens ci-dessus.
Connectez votre PC via un câble USB de type C au servomoteur.
Ouvrez le logiciel spécifique de mise en service de TWX appelé « Cockpit LT », disponible gratuitement dans la section Logiciels et outils.
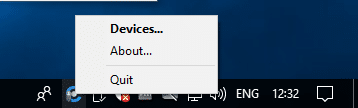
CLIQUEZ DROIT sur l’icône Windows « serveur de connexion » qui reste toujours visible en bas à droite du bureau, lorsque le logiciel Cockpit LT est ouvert.
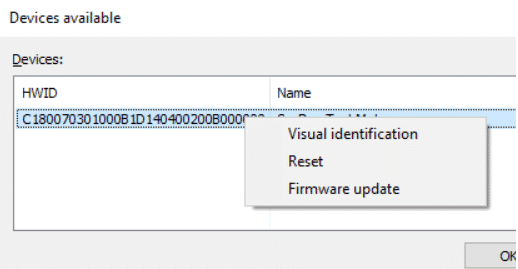
Cliquez à gauche sur DEVICES => cliquez à droite sur l’appareil à mettre à jour -> cliquez à gauche sur FIRMWARE UPDATE et suivez la procédure.
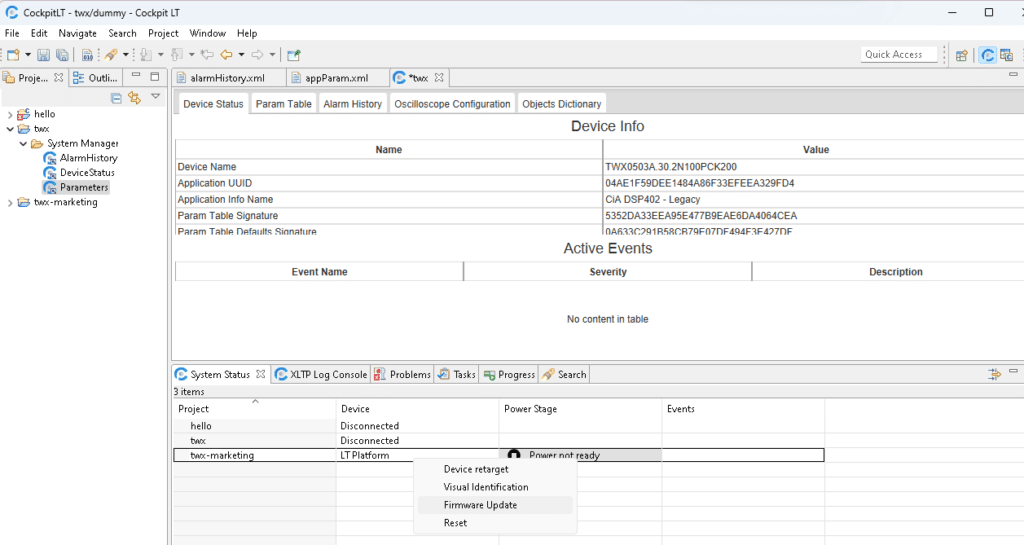
La même fonction de mise à jour du firmware est également disponible dans le logiciel Cockpit LT, dans l’onglet DEVICE STATUS, comme indiqué dans l’image ci-dessous.
Cliquez simplement avec le bouton droit de la souris sur l’appareil à mettre à jour et sélectionnez Mise à jour du micrologiciel dans le menu.
INTÉGRATION DE TWX DANS UN RÉSEAU DE BUS DE TERRAIN
Téléchargement des fichiers EDS/ESI génériques de l'usine
Fichiers d’information génériques Electronic Data Set (Canopen) et ESI .xml Ethercat, pour configurer le réseau FieldBus ou le maître afin qu’il fonctionne avec nos servomoteurs de la série TWX.
Application spécifique Téléchargement EDS/ESI à partir du lecteur
L’outil CockpitLT permet de télécharger, directement à partir du variateur TWX, les fichiers EDS/ESI de l’implémentation spécifique utilisée, afin d’intégrer le variateur dans un réseau ou un maître bus de terrain existant.
Cliquez simplement sur l’onglet « Object Directory », sélectionnez « Get all files », puis « Get ESI ». (voir la capture d’écran du logiciel ci-dessous)